YoloV5 模型训练#
一、环境准备#
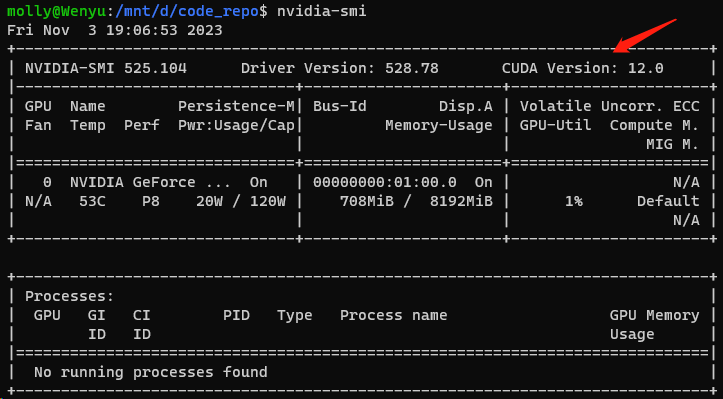
检查显卡驱动:
nvidia smi如果显示“Command ‘nvidia-smi’ not found, …”,说明没有安装显卡驱动
点击左下角的“9个小方块”图标,然后搜索“软件和更新”(Software & Update),查看下面的附加驱动(Additional Drivers),选择一个进行安装(这步选择哪个可能需要进一步结合具体情况选择,我的是RTX3090+ubuntu20.04,选择了最前面的470)
重启,然后再运行“nvidia-smi”指令来看驱动是否安装成功 (有如下图返回一个表格就代表驱动成功了),且右上角后面跟着推荐的CUDA版本号。
- 可能需要的其他知识:
- 如何看显卡型号:
```bash
lspci | grep VGA
```
- NVIDIA 后面会跟着ID,可以去nvidia官网查ID对应的显卡型号
如果已经装了显卡驱动,用下面的命令更便捷
```bash
nvidia-smi -L
```
安装CUDA
二、训练流程#
数据准备:
搜集需要的图片,例如红绿灯、行人、车辆的图片。
使用标注工具(例如labelImg)为图片中的对象进行标注。YOLOv5需要的是YOLO格式的标注文件,即每张图片都会有一个对应的
.txt文件,其中包含对象的类别和坐标。
数据组织:
将所有图片放在一个目录中,例如
images/,并将所有的.txt标注文件放在另一个目录中,例如labels/。分割数据集为训练集和验证集。
配置文件:
创建一个
.yaml文件,指定类别和数据的路径。例如data.yaml: .. code-block:: yamltrain: path/to/train/images/ val: path/to/val/images/ nc: 3 # 类别数量,例如:红绿灯、行人、车辆 names: [‘traffic_light’, ‘pedestrian’, ‘vehicle’]
安装依赖并克隆YOLOv5仓库:
git clone https://github.com/ultralytics/yolov5.git cd yolov5 pip install -U -r requirements.txt
训练模型:
python train.py --img 640 --batch 16 --epochs 100 --data data.yaml --cfg models/yolov5s.yaml --weights yolov5s.pt 这里用的是YOLOv5的小模型配置\ ``yolov5s.yaml``\ 和预训练权重\ ``yolov5s.pt``\ 。你可以根据需要选择其他模型配置。
- 评估模型:
YOLOv5的训练脚本在训练结束后会自动评估模型。可以查看
runs/train/exp目录下的结果,其中包括了损失、准确率、混淆矩阵等信息。
使用训练好的模型进行推断:
python detect.py --source path/to/test/images/ --weights runs/train/exp/weights/best.pt --conf 0.4
优化:
如果模型的性能不理想,可以尝试更多的数据增强、更长的训练周期、使用更大的模型配置等方法进行优化。
三、开源数据集#
以下是一些包括红绿灯、车道线、行人和斑马线的标注的公开数据集(for research purpose only):
Cityscapes Dataset: 这是一个大型的城市场景数据集,其中包括车道线、行人、车辆等多个类别的标注。它包括精细的语义分割标注,但需要注意的是,它不提供红绿灯的实例级别标注。
Berkeley DeepDrive (BDD100K) Dataset: 这是一个非常大的驾驶相关数据集,其中包括多个类别,如车道线、行人、车辆等。它为图像提供了边界框和语义分割标注。
LISA Traffic Light Dataset: 这是一个专门用于红绿灯检测的数据集。
Tusimple Lane Detection Challenge: 这是一个专门用于车道线检测的数据集。
Apolloscape: 该数据集包括多种驾驶相关的任务,其中包括车道线和语义分割。
Mapillary Vistas Dataset: 这是一个街景数据集,其中包括多个类别的标注,包括行人、车辆、红绿灯和斑马线。
以下是这些数据集的官方链接:
Cityscapes Dataset:
Berkeley DeepDrive (BDD100K) Dataset:
LISA Traffic Light Dataset:
Tusimple Lane Detection Challenge:
Apolloscape:
Mapillary Vistas Dataset: